

 联系我们
联系我们

1. 如果希望ABB机器人定时输出信号,可以使用定时中断itimer,比如0.1s一次,中断里执行输出信号
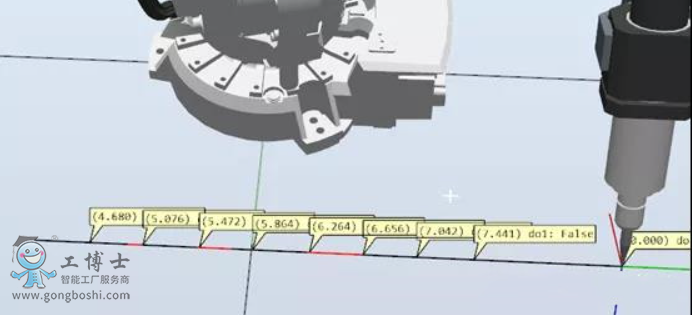
2. 如果希望机器人定长距离输出信号,比如每10mm一次,不论机器人速度快慢,如何实现?
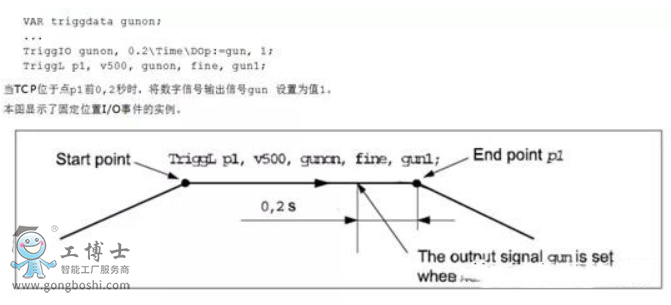
3. 可以通过ABB机器人的Trigger功能来实现。
4. TriggIO gunon,0.2\Time\DOp:=gun,1表示距离终点前提早0.2s,将信号gun置为1
5. 如果从起点开始往后10mm输出信号,可以使用
TriggIO gunon,10\Start \DOp:=gun,1
6. 代码如下,使用triggdata数组。注:triggdata数组内元素不能超过25,否则执行时会报错
VAR triggdata trigg1{25};
PROC idis()
reg1:=10;
FOR i FROM 1 TO 10 DO
TriggIO trigg1{2*i-1},(2*i-1)*reg1\Start\DOp:=do1,1;
TriggIO trigg1{2*i},2*i*reg1\Start\DOp:=do1,0;
ENDFOR
MoveL p100,v100,fine,MyTool\WObj:=wobj0;
TriggL p200,v100,trigg1,fine,MyTool\WObj:=wobj0;
ENDPROC
了解更多请点击:ABB机器人
